皮带秤的作业原理
皮带秤便是专关于非整装物料的接连计量而规划的。它也是依据杠杆原理,在接连工作的皮带下面设备杠杆设备,杠杆的承载面则是几个滚筒设备,用来满意皮带在上面走过期减小皮带与承载面的磨擦而构成的计量差错。一起计量部分也甩掉了传统的秤砣设备,而选用运用应变电阻制作的称重传感器来进行计量。3 e$ p8 B, l f9 p, U A
电子皮带秤承重设备的秤架结构主要有双杠杆多托辊式、单托辊式、悬臂式和悬浮式4种。双杠杆多托辊式和悬浮式秤架的电子皮带秤计量段较长,一般为2~8组托辊,计量准确度高,适用于流量较大、计量准确度要求高的当地。单托辊式和悬臂式秤架的电子皮带秤的皮带速度可由制作厂确认,适用于流量较小的当地或操控流量配料用的当地。
电子皮带秤运用最广泛的皮带秤。由承重设备、称重传感器、速度传感器和称重显现器组成(图2)。称重时,承重设备将皮带上物料的重力传递到称重传感器上,称重传感器即输出正比于物料重力的电压(mV)信号,经扩大器扩大后送模/数转换器变成数字量A,送到运算器;物料速度输入速度传感器后,速度传感器即输出脉冲数B,也送到运算器;运算器对A、B进行运算后,即得到这一丈量周期的物料量。对每一丈量周期进行累计,即可得到皮带上接连经过的物料总量。
滚轮皮带秤由重力传递体系、滚轮、计数器和速度盘组成(图1)。速度盘转速正比于皮带速度。滚轮翻滚的角速度正比于皮带上经过的物料量。滚轮在速度盘上翻滚的方位由物料的重力巨细来调整。当皮带上没有物料时,滚轮接近速度盘中心,转速为零,计数器不累计;当皮带上有物料时,滚轮跟着重力变大向周边移动,并带动计数器记下皮带上经过的物料总量。
但皮带上面无料时速度最快也不是无限制的快速,皮带电机也不能直接带动皮带工作。所以,不同的物料喂料量,会选用不一样的减速组织来操控皮带的最快速度,改动变速比也就改动了不同物料计量皮带秤的满量程的规模。
对放置在皮带上并随皮带接连经过的松懈物料进行主动称量的衡器。主要有机械式(常见的为滚轮皮带秤)和电子式两大类。
电子皮带秤有累计和瞬时流量显现,具有主动调零、半主动调零、自检毛病、数字标定、流量操控、打印等功能。
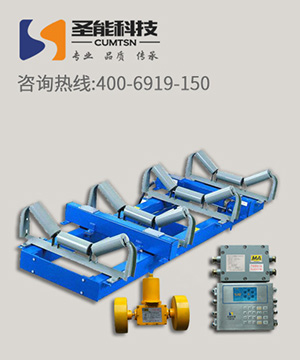
电子皮带秤,由秤架,测速传感器,高精度测重传感器,电子皮带秤操控显现外表等组成,能对固体物料进行接连动态计量
电子皮带秤称重桥架设备于输送机架上,当物料经过期,计量托辊检测到皮带机上的物料分量经过杠杆作用于称重传感器,发生一个正比于皮带载荷的电压信号。速度传感器直接连在大直径测速滚筒上,供给一系列脉冲,每个脉冲表明一个皮带运动单元,脉冲的频率正比于皮带速度。称重外表从称重传感器和速度传感器接纳信号,经过积分运算得出一个瞬时流量值和累积分量值,并别离显现出来。
皮带上面的物料经过杠杆设备的承载面时,会对承载面发生必定的压力,经过杠杆设备将该压力传送到称重传感器,而操控设备将称重传感器感应的分量压力信号进行扩大处理后,以数字的方法来进行显现。一起能对显现的数字信号进行外部人为操控,使计量皮带秤按人们实践要求的喂料量主动改动皮带的速度快慢,对给定喂料量进行盯梢,然后构成皮带上料多时,速度变慢,料少时速度变快,无料时速度最快,而超载时最慢甚至会停下来的操控特性。9 B3 _1 [. ]* j$ D, X